Mechanics of Movement
Part 3
ACTION COMING
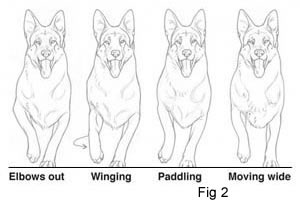
Viewed from the front, the forelegs converge to the centerline of the body, or single track. From the point of shoulder down, the line of the leg should be straight. The straight line does not start at the tip of the scapula, because the scapula and upper arm wrap around the curvature of the chest which, unless the dog is remarkably slab sided, should have some breadth (Fig 1). Twisting or buckling of the elbow or pastern joints are serious faults, and may forewarn serious injury if the dog attempts high level jumping. Crossing over shows a marked lack of balance and wastes a lot of energy, while moving wide will cause the dog’s weight to be shifted back and forth laterally, another major waste of energy. Crabbing, where both the forehand and the rearhand single track, but on parallel lines, also wastes energy, and is driving energy along a spine which is not aligned to the dog’s direction of travel (Fig 2). Whatever energy is being dissipated laterally or in any direction other than that which the animal is moving, is being wasted.
ACTION GOING
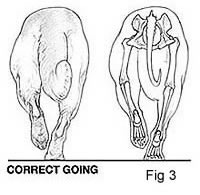
Viewed from the rear, the hind leg in the supporting position should describe a virtually straight line. The muscles of the hind leg are not designed to support a leg whose joints are buckling laterally, and any tendency to cow or bandy hocks, knock or wide knees will put a huge burden on the joints, and dissipate energy unnecessarily (Fig 3, Fig 4). However, the forward moving leg will probably not be straight, as seen from the rear. A folded leg will show massive muscles well bunched up, and this usually causes the leg to swing a little wide, and out of the single tracking position. The dog whose leg maintains the single track position at all times may be too thinly muscled and narrow in body. Watch any athletic animal coming towards you, and you will see that the swinging limbs leave the centerline (Fig 5). Also visible going away is the firmness of the back. Some animals may be well enough constructed, but are so poorly conditioned that in motion one can see the back bouncing, flexing laterally or rolling. Bad condition can be as detrimental to good movement as bad structure (Fig 6).
SIDEGAITING
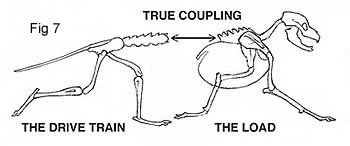
Sidegaiting at the trot gives a good profile of the dog's conformation in movement. It demonstrates the drive in the rear, the reach in front, and the strength of the back spanning the distance between. The juncture between the lumbar and thoracic vertebrae is what I call the true coupling between the drive train and the load (Fig 7). The bulk of the dog’s body weight consists of the head, neck, forehand and chest, all of which is suspended in some way from the thoracic vertebrae. At this point along the spine, the dorsal spines change from the forward thrust of the lumbar region, to the taller, slightly backwards configuration of the withers. Between these is a slight dip. This dip may or may not show, depending on the dog’s muscling, fat coverage and coat quality, but it is there, and it’s perfectly normal (Fig 8). All land mammals have it. Breeding in a roach to try to eliminate it in some misguided attempt to produce a stronger looking back actually produces a spine that cannot as efficiently transmit power. The vertebral disks of the withers should align in a straight line with the lumbar vertebrae, to most efficiently continue the path of propulsive power, but the visible silhouette of the correct back will show a slight change in direction between the line of the withers and the back. As long as there is no actual buckling of this coupling, the dog is showing a normal back.
During the power generating stage of the stride, energy travels up from the ground, along each leg bone and is concentrated into the hip joint. This joint must take every bit of force provided by the rear, and channel it upward and forward into the spine. When you realize the stresses the hip joint must tolerate, the deterioration over time of less than good hips is easy to understand. Open a normal joint of almost any mammal, and you will see a perfect sphere, pearl-like in its smoothness, riding inside a similarly flawless, satiny bed. The deeper and more perfect the joint, the greater the surface area in that joint available to absorb the force of the stride and distribute it evenly into the pelvis, and the less stress applied to any particular point of the sphere. Inconsistency over the surface of that sphere alters the distribution of force in the same degree, decreasing it in some spots and increasing it in others, eventually producing the flattening effect and other arthritic changes seen in dysplastic hips. Anyone who has suffered heel spur knows how uncomfortable even minute bone remodeling at a pressure point can be.
From the hip joint, energy is transmitted through the pelvis into the sacral joint, where the spine and the pelvis are joined. The gentle, moderate slope of the pelvis enables power to be guided gradually into a horizontal direction, reducing stress on both the hip and sacral joints (Fig 9). If the pelvis is very steep, as it is in so many American show dogs, the sacral joint must absorb more energy than it should. If it is very flat, the hips must absorb too much energy (Fig 10). The degree of pelvic slope that we want in our shepherds isn’t really any different from what is seen in almost any four legged beast who must carry its own weight and still move quickly and efficiently. The crocodile, which rarely supports its weight off the ground and is an inefficient mover, has a pelvis whose angle is almost completely level. On the other hand the elephant, that must support a huge amount of weight almost every hour of its life and cannot move faster than a running walk, shows a pelvis that is almost completely vertical. Most others; felines, canines, ungulates of all kinds; show a moderately sloping pelvis.
Stride length can also be affected by pelvic slope because of the alteration in the leverage of the muscles. In a steep pelvis, the muscles attaching the rear of the pelvis to the femur are shortened, reducing thrust. In a flat pelvis, the muscles attaching the front of the pelvis to the femur are shortened, reducing forward reach. Either way, reach and follow-through are similarly affected, stride length is compromised and power reduced (Fig 11).
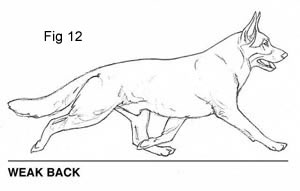
From the rearquarters, power is transmitted forward through the lumbar vertebrae. These are thick, massive disks that can absorb large amounts of energy, and to whose long, forward pointing processes are anchored the muscles that help pull the leg forward and arch the spine. The lumbar vertebrae must also support the weight of the dog’s entire front half when suspended. In motion, the lumbar spine should be straight and horizontal for the energy it must carry to transmit without wastage. If it is sagging, energy will be dissipated in directions other than forward, and the spine’s ability to absorb a powerful rear thrust will be compromised (Fig 12). Similarly, if the area is roached, buckling and energy wastage will also occur. The greater the force applied, the greater will be the tendency to buckle, increasing vulnerability to injury. Animals with even a slight tendency to a roach back when standing will usually show an even more pronounced roach in motion, and this is why.
Weak withers are as reprehensible as a weak back. The area of the withers and neck is cloaked with the massive muscling required to move the entire fore assembly, rotating the scapula forwards and backwards, and absorbing the impact of the forehand stride. In the rear, the solid, bony mass of the hip joints and pelvis absorb the stride, but in the front there is only the saddle of muscle over the withers. Weak withers will show in the dog’s inability to reach well ahead, and in a jolting action of the tip of the scapula under the skin (Fig 13). This can be subtle at the trot, but when jumping, the shoulder blades almost seem to drive themselves out the dog’s back. Strong, high withers with a muscled, well carried neck showing an elegant arch are indicative of a powerful forehand, and without them even ideal shoulder angulation won’t be as effectively utilized.
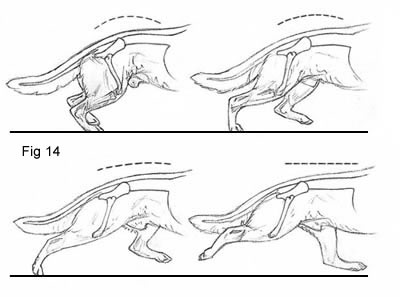
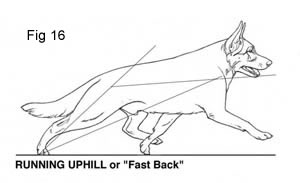
Of course, a firm back doesn’t mean that the spine cannot flex. Flexing is most obvious at the gallop, when the spine itself becomes a instrument of propulsion, particularly through the lumbar region, gathering energy and propelling the body like a spring with each stride. Even at the trot, it may show a tiny bit of flexion at each stride, adding a bit more forward propulsion. A strong back needn’t look like a steel post without any flexibility at all (Fig 14). Despite its flexibility, the spine must remain level. Animals who run “downhill” with their withers lower than their croups are usually much less angulated in the rear than in the front, and are completely unbalanced. Some of their forward energy is being wasted downwards, throwing too much stress on the forehand (Fig 15). Dogs that run uphill have the reverse problem, wasting energy upwards, thrusting the front too high and stressing the rear (Fig 16).
As the dog moves ahead, its power both in the front and in the rear is coming from muscular exertion, tendon elasticity and the pull of gravity. The latter is the pendulum action of the the body literally falling forward from its own weight and inertia over the forehand, and is a source of “free” energy. The higher a body is off the ground, the greater the pendulum action achieved. Giraffes use a lot of it. Dachshunds use very little. The longer the legs, the more of this free energy is available to the animal, another argument against very low stationed, short legged dogs.Anyone who has looked closely at a good moving dog will have noticed that it doesn’t literally single track. To achieve single tracking, the feet not only have to converge on the centerline of the body, the rear feet have to step into the tracks left by the front feet. Unless an animal is square in structure with very little angulation, like elephants or fox terriers, there will be some degree of overreach, with the rear feet landing ahead of the step of the front feet. That means that the the rear foot as it travels ahead must move to one side or the other of the front foot to clear it. The front foot does not move ahead of the rear foot, if the dog is coordinated and moving in proper rhythm. When the rear leg is at maximum extension forward, the front foot will be close to its maximum rearward follow-through, and the two must cross each other, as seen from the side.
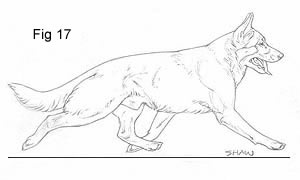
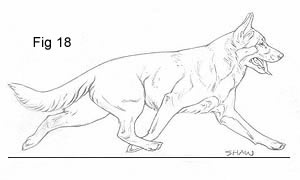
A coordinated dog will show a left or right lead at the trot, with one hind foot passing on the inside and the other passing on the outside of the forefeet. If the dog is moving to the right, it will have a left lead, with the left rear foot passing on the outside. If it is moving to the left, it will have a right lead, with the right rear foot passing on the outside. This results in triple tracking and helps the dog direct its energy and make the turn. In nature, animals rarely move in perfectly straight lines (Fig 17, Fig 18).
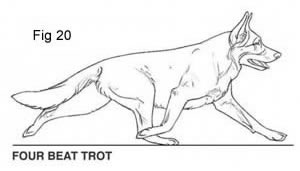
Occasionally there seems to arise a debate on whether the supported trot or flying trot is the more correct gait for the breed. In fact, both are typical. The supported trot is a two-beat gait, executed at lower speeds (Fig 19). The flying trot is a four beat gait and a function of higher speed (Fig 20). This is because, when the diagonal legs of an ideally constructed animal with absolutely balanced angulation are moving in perfect cadence and are at full and equal forward extension, the rear foot will be at a slightly lower level than the fore foot, and will strike the ground fractionally ahead of it. This is not without purpose, as it is the hind foot that finds the dog’s centre of gravity and enables it, if necessary, to adjust its balance before propelling its weight over the foreleg. Unbalanced dogs may show a tendency to touch down much earlier in the rear than the front, as they are trying harder to achieve equilibrium, while balanced but under angulated dogs, as well as correct dogs moving at a slow jog trot, will exhibit the simple two-beat trot.
The correct dog is the one that can cover the greatest amount of ground with the least expenditure of energy. Assuming dogs of equal size, condition, age and temperament, it is obvious that the flying trotter will cover more ground. The flying trotter's stride is equal to the supported trotter's stride plus the length of its period of suspension. The issue is whether the flying trotter is expending more effort than the supported trotter and, if so, whether the difference is more or less than the effort the supported trotter would have to expend to achieve equal ground coverage. This can be determined by observing when the dog shifts its gait in the attempt to minimize its expenditure of energy: the stage in its movement when the dog shifts up to a flying trot.
The flying trot is a function of speed and there is likely no dog of any breed that is not capable of it (Fig 21). The flying trot is not a trained or handler induced gait. All dogs can do it, no matter their structure, good or bad. The flying trot is nothing more than a faster version of the supported trot, just as the suspended gallop is a faster version of the canter. In nature, the only real impediment to moving with suspension is body size and weight - extremely large animals cannot achieve a period of suspension, or do so rarely and with great effort.
The dog at the walk, when it wants to increase its speed or the amount of ground it covers, increases both the length and speed of its strides, no differently than humans. Anyone who has ever tried power walking, the human equivalent of the supported trot, will realize that at some point the walking gait demands a great deal of energy and it becomes easier to maintain or increase speed by shifting into a run, or flying trot, and utilizing the inertia of the body’s motion through space. The poorly angulated dog cannot achieve a long length of stride and must attempt to achieve greater speed by moving faster, and ultimately shifting into the next higher gait earlier than would the correct animal. The better structured animal can stretch out into a near maximum length of stride at the supported trot, while the inferior dog must shift into a flying trot to keep up. In other words, a period of suspension at a relatively low rate of speed is probably indicative of structural problems. Increased demands for speed will eventually cause the ideal dog to shift into a fast flying trot as well, but at the same time its inferior mate will have to resort to a canter or gallop, giving the trotter that beautiful illusion of moving in slow motion.
Breeders must be careful, however, not to develop the flying trot into a caricature of itself, producing animals that are loosely ligamented and over-angulated in the rear, and that show a length of stride that, while impressive to the uninformed, is excessive (Fig 22). This extreme type loses its athleticism at other gaits and in jumping. The correct GSD is capable of a supported trot that is longer, more flowing and more efficient than any other breed, but it can also display the most efficient and spectacular version of the flying trot (Fig 23).