Mechanics of Movement
Part 1
Written & Illustrated by Linda Shaw MBA
By now we have a good understanding of the structural anatomy of the GSD and its basic gaits. Now we must turn our attention to how the dog moves at an anatomical level, to give us a good understanding of why some kinds of structure are desirable and others are not. I think the most logical approach is to follow the progression of energy, from the first generation of power, along its transmission to its final dissipation (Fig 1). The less fragmented this line of progression, the more concentrated the power and the more efficient the dog’s movement. Faults of structure result in energy leakage, and the more leakage, the less is available for the wanted task. Leakage also creates stress on areas of anatomy in ways they are not designed to withstand. For the sake of convenience, and because it is the gait at which the breed is commonly judged, we’ll focus initially on the trot, discussing aspects of the other gaits where appropriate.
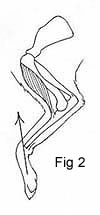
First however, a very brief anatomy lesson. The leg consists of several components. The bones are the underlying architecture that give support, strength and basic structure. To them are attached the muscles, which for our purposes fall into two groups, flexors and extensors. Flexors are those muscles that, when they contract, close the joint and flex the limb, as when you lift your leg or crook your arm (Fig 2). Extensors, when they contract, do the opposite, opening the joint and straightening the limb (Fig 3). Muscles are fleshy masses which at their ends become tendons: tough, stringy fibers that act as ropes upon which the muscle will pull to move a bone. The tip of the tendon is attached to a process, a bony protuberance that gives the muscle extra leverage in moving the bone.
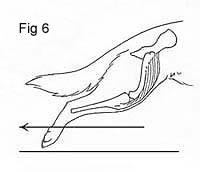
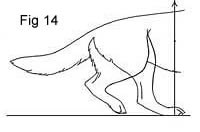
For instance, in both dogs and humans the calf muscle is a large muscle attached at the top of the back of the lower leg bone, the fibia, and that stretches down to become the Achilles tendon at the back of the ankle, attaching to the bony process that is the heel bone (Fig 4). When the calf muscle contracts, it shortens dramatically and powerfully, pulling the heel bone towards it. The foot is like a seesaw and pivots at the ankle joint, the heel going up and the toes going down. In humans this muscle is so powerful that with just one leg it can lift and propel the entire weight of a large man. Some muscles are situated on the inside of a joint and span the angle between two bones to pull them together and bend the joint. Muscles at the back of the thigh reach down and attach to the bone below the knee, and when they contract, the knee (or stifle) bends (Fig 5). Other muscles reach around the outside of a joint. The front thigh muscle sends its tendon over the top of the knee to attach to the top of the shin. When it contracts, it pulls the bones into alignment and straightens the knee (Fig 6).
A muscle’s power is related to its shape. When relaxed, it is soft and has no strength. It generates power by contracting, or shortening lengthwise, and becoming denser and hard to the touch. A long, slim, flat muscle can contract to a huge degree, losing a third of its length and giving the bone to which it is attached a great deal of leverage and a wide range of movement. That is why gazehounds built for speed have long, slim, flat muscling. Short thick muscles cannot shorten so dramatically, but because they are so well endowed with muscle fibres their contractions are very powerful and sustained. They can’t provide sweeping movement, but they do offer great strength. So malamutes, mastiff and bully breeds, who require strength and endurance, have short, thick muscles (Fig 7a).
Similarly, the bones reflect the requirements of speed or strength. Long bones give great leverage and long strides for speed and jumping ability. However, they are usually lighter and can be more fragile. Antelope and deer, even the cheetah, are ideal examples. Short, thick bones can’t give exceptional leverage, but they have weight, strength and stability, and can withstand the stress generated by massive muscles. Badgers, wolverines, bear and bulldogs are typical examples (Fig 7b).
The GSD must have a balance of speed, agility, strength and endurance. He must be able to outrun and out jump a young man, subdue an angry 200lb ram and patrol a moving flock all day, every day. A tall, thin, light dog may not have the power to protect himself or his handler in a serious fight. The heavy, low stationed, short legged dog will not have the stride to gallop or jump well, and his weight will sap his energy. This breed has to have it all, but without one characteristic becoming so developed as to atrophy another. Certainly, fitness and conditioning can go a long way to compensate a dog's shortcomings, but having good structure in the first place, plus conditioning, will give the dog the best possible advantage whatever its task.
Power generation begins in the rear. It starts at that point in the stride where the hind foot takes on the body’s full weight and can begin to drive it forward (Fig 8). This happens when the paw is planted vertically beneath the hip joint. In this position, the leg is at maximum contraction. This is what we call the support position. During the phase where the paw is ahead of the hip at the forward part of the stride it is beginning to support the body weight, but is still contracting. There is some contraction of the extensor muscles, sufficient to keep the body supported, but full extension at this stage would push the body backwards. Obviously, there is some upward propulsion as well. At the beginning of propulsion, it is nearly straight up, and as the stride progresses, the line of propulsion up the leg slants more and more forward. Some upward force at the beginning of the stride is desirable. It gives the body that bit of lift required for the period of suspension when the body travels forward without contact with the ground, purely of its own momentum. Momentum gives motion without effort, so a long period of suspension is highly desirable. Too much lift however, can make the dog appear to bounce up and down and can actually shorten the period of suspension, wasting energy.
At a walk, very little propulsion is required and dogs, like humans, will generate only enough to literally fall forward, catching their weight with each stride. At a trot however, greater speed is required, as well as lift, and the propelling leg must generate more power. At the support position, the hindquarter will sink slightly, increasing angulation and the leg’s potential thrust . A dog with very little angulation can produce very little thrust at the trot (Fig 9). Ideal angulation produces the most thrust for the least expenditure of energy. The over angulated dog can often produce good thrust, but he must also expend more energy to forcefully extend his overangulated legs when in motion, and to keep the acutely angled levers of his hind legs from collapsing when in the support position. Because about half the total length of the stride is actually involved in generating power, total length of stride is important. The greater the angulation the longer the stride, but the cost in energy consumption goes up.
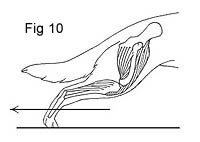
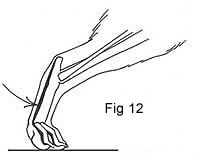
As the hind leg is thrusting backwards, several things are happening (Fig 10). The femur or thigh bone is moving backwards, the result of powerful contractions of the muscles connecting the rear pelvis and thigh. The knee is straightening, because of the contractions of the muscles attached to the femur and shin, over the patella. The patella adds a bit of extra distance the tendon must stretch, increasing leverage. Finally, the hock joint is straightening, because of the action of the calf muscle previously discussed. All these massive muscles work in concert to produce a single, powerful, straightening thrust of the leg. In a dog lacking angulation, these muscles are shorter and cannot contract to the same degree as those of a well angulated dog, producing less thrust. More than muscle work is involved however. At the support position the leg is well bent, and the tendons running over the knee and the hock joint (the Achilles) are stretched like elastics, storing energy (Fig 11). As the leg moves backwards, this energy is released as the tendons snap back to their normal lengths, further helping to open the knee and hock joints. The overangulated dog, with over bent joints, has overlong, sloppy tendons that have limited ability to stretch and store energy. Also, as the foot moves backwards, the toes are stretched back, much like bending your fingers back, stretching their tendons and adding even more snap to the stride (Fig 12). Longer toes that are well knuckled up give the most leverage and elastic snap. Flat feet give the least. The propulsive power of short, strong tendons is “free” power, in the sense that it requires no muscular work, and is the best argument against overangulation.
At the end of the stride the leg will be nearly, but not completely straight (Fig 13). Not completely, because the trot is not a gait of maximum exertion. The dog that shows a maximum degree of stride length at the trot is expending too much energy, and while it will no doubt show a visually spectacular side gait, it cannot keep this up for a prolonged period of time. At increased speeds, the gallop is more cost efficient. Also, extreme side gaiters tend to show diminished follow-through, with the hind foot leaving the ground but failing to continue its sweep backwards. Follow-through is important, much like the back swing of a golfer’s club. It finishes the stride, allowing the thrust to die gradually and ensuring that the most powerful part of the swing or stride is expended where it will do the most good; on the ground. The extreme mover will often travel so low to the ground that its toes are dragging in the grass. It is probably better that a dog kick up somewhat behind, than show no follow-through at all.
At the same time that one leg is thrusting backwards, the other rear leg is moving ahead (Fig 14). It should move low to the ground. Hoisting a heavy leg higher than necessary uses energy. Having to reach too far ahead also takes energy. Most dogs, whatever their structure, attempt to reach to their centre of gravity, which is usually located a bit behind the centre of the rib cage, to find their balance. A correctly structured dog need not reach so far ahead as a long bodied dog. When the foot has found the ground, it begins to support the weight of the body being propelled over it, and to fold into the support position in preparation for the next stride. It should be noted that the rear foot should strike the ground with the plantar pad first, and the toes second, but never with the heel or hock. Overangulated dogs, especially those with sickle hocks, tend to show a flat footed stride, forcing the hock to absorb a ground strike for which it is not designed (Fig 15). If you examine the bottom of the dog’s hock and see what appears to be an extra pad of callused skin half way up, or worse, at the tip of the hock, this is due to the hock’s repeated abrasion with the ground and is unacceptable.